Table of Contents
Advertisement
Quick Links
Advertisement
Table of Contents

Related Manuals for ABB ACS140
















Summary of Contents for ABB ACS140
- Page 1 ac.maher.co.ir...
- Page 2 User’s Manual Drive for type ACS140 Low Voltage frequency converters AC Drives from 0.12 to 2.2 kW ac.maher.co.ir...
- Page 3 ac.maher.co.ir...
- Page 4 ACS140 Frequency Converter User’s Manual 3BFE64273736 Rev C Effective: 05.05.2004 © 2004 ABB Oy ac.maher.co.ir...
- Page 5 ac.maher.co.ir...
- Page 6 Warning! Even when the ACS140 is powered down, there may be dangerous external voltages at relay terminals RO1A, RO1B, RO2A, RO2B. Warning! The ACS140 is not a field repairable unit. Never attempt to repair a broken unit; contact the supplier for replacement of the unit.
- Page 7 ac.maher.co.ir...
-
Page 8: Table Of Contents
Setting Parameter Value .......... 22 Menu Functions ............23 Diagnostic Displays ..........23 Resetting the Drive from the Control Panel ....24 ACS140 Basic Parameters ......25 Application Macros ........... 29 Application Macro Factory (0)........30 Application Macro Factory (1)........31 Application Macro ABB Standard ...... - Page 9 Application Macro Motor Potentiometer ....35 Application Macro Hand - Auto......... 36 Application Macro PID Control ......... 37 Application Macro Premagnetise......38 ACS140 Complete Parameter List....39 Group 99: Start-up Data ........... 44 Group 01: Operating Data ........45 Group 10: Command Inputs ........47 Group 11: Reference Select ........
-
Page 10: Installation
Study this manual carefully before proceeding. Failure to observe the warnings and instructions given may cause a malfunction or personal hazard. See A CHECK the environment. INSTALL the ACS140. See B, C See D REMOVE the cover. ATTACH a warning sticker in the See E language of your choice. -
Page 11: Reference Sections
<95% (non condensing) Contamination No conductive dust allowed. Levels The ACS140 should be installed in clean and dry air, (IEC 721-3-3) free from dripping water, according to IP classification. Cooling air must be clean, free from corrosive materials and electrically conductive dust (pollution degree 2). -
Page 12: Dimensions (Mm)
B Dimensions (mm) (d2) d1 + d2 Frame 200 V Series Weight (kg) Size (d2) d1+d2 IP 20 400 V Series ac.maher.co.ir... -
Page 13: Installing The Acs140
Standard Series (Frame sizes A, B, C and D) Install the ACS140 vertically. Leave 25 mm free space above and below the unit. Ensure that there is sufficient cool air in the cabinet to compensate for the power losses (power and control circuits) listed at the end of section R, “Technical Data”. - Page 14 Flange mounting The ACS140 can be installed so that the heat sink is in an air duct. The power circuit losses will then be dissipated outside leaving only the control circuit losses to be dissipated inside (see R). Heatsinkless Series (Frame size H) Note! The frame size H does not include the heatsink.
- Page 15 Thermal grease After installation, verify the thermal design by monitoring the temperature (parameter 0110) of the ACS140. The thermal design is successful if the ACS140 temperature does not exceed 85 °C under full load and maximum ambient temperature. ac.maher.co.ir...
-
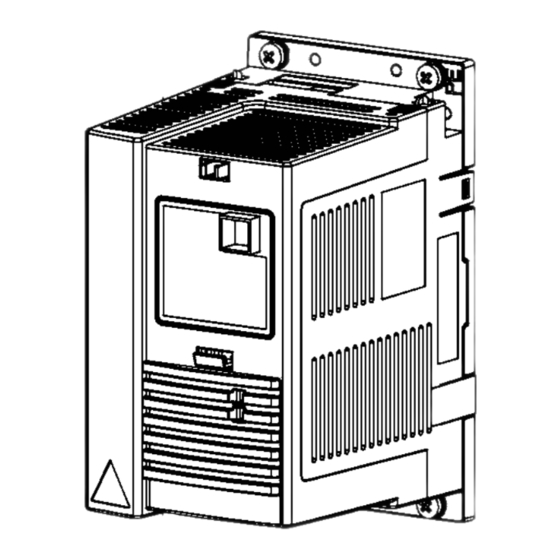
Page 16: Removing The Cover
For optional ACS braking unit/chopper. Motor cable shield Follow local rules for cable cross-sections. Use shielded motor cable. Route the motor cable away from control wires and the power supply cable to avoid electromagnetic interference. Note! See "ACS140 EMC Instructions" on page 85. ac.maher.co.ir... -
Page 17: Terminal Interface
G Terminal Interface Power Supply Input Protective Earth Control Terminals, see K ABB Oy ACS143-1K6-1 U1 3* 200...240 V U2 3*0..U1 f1 50/60 Hz f2 0..300 Hz 5.3 A 4.3 A S/N 242A0001 Warning Sticker DIP- Warning! Dangerous voltage Wait 5 minutes after... -
Page 18: Type Designation Label And Code Key
50 Hz or 60 Hz. If the motor values differ from these, the group 99 parameter values must be changed. The motor nominal current, I , must be less than the nominal output current of the ACS140, I (See H and R). ac.maher.co.ir... -
Page 19: Control Terminals
45 °C and 50 °C. Note! DI 4 is read only when powered-up (Factory macro 0 and 1). Note! For fail safe reasons the fault relay signals a “fault”, when the ACS140 is powered down. -
Page 20: Connection Examples
L Connection Examples ACS140 1-10 kΩ AI 1 S1:1:U AGND S1:2: 10 V AI 2 AGND DI configuration AGND Factory (0) 12 V NPN connected Start/ DCOM Reverse Stop DI 1 DI 2 DI 3 DI 4 DI 5 RO 1A... -
Page 21: Power On
• the isolations in the motor circuit. Note! Whenever the ACS140 detects a fault condition, the fault relay activates. The motor stops and the ACS140 will wait to be reset. If the fault still persists and no external cause has been identified, contact your ACS140 ac.maher.co.ir... -
Page 22: Motor Overload Protection
180 s 300 s 600 s ∞ Output frequency 35 Hz Q Loadability of ACS140 In the event of an output overload, the ACS140 will trip. duty cycle = t/T T< 10 min time Ambient temperature, Θ max. is 40 °... -
Page 23: Type Series And Technical Data
R Type Series and Technical Data Standard 200 V series Nominal motor P 0.12 0.18 0.25 0.37 0.55 1~ Input ACS141- K18-1 K25-1 K37-1 K75-1 1K1-1 3~ Input ACS143- K75-1 1K1-1 Frame size Nominal ratings (See H) Unit Input voltage U 200 V-240 V ±10 % 50/60 Hz (ACS141: 1~, ACS143: 3~) Continuous output current I... - Page 24 Standard 200 V series Nominal motor P 0.75 1~ Input ACS141- 1K6-1 2K1-1 2K7-1 4K1-1 3~ Input ACS143- 1K6-1 2K1-1 2K7-1 4K1-1 Frame size Nominal ratings (See H) Unit Input voltage U 200 V-240 V ±10 % 50/60 Hz (ACS141: 1~, ACS143: 3~) Continuous output current I (4 kHz)
- Page 25 Standard 400 V series 0.37 0.55 0.75 Nominal motor P 3~ Input ACS143- K75-3 1K1-3 1K6-3 2K1-3 2K7-3 4K1-3 Frame size Nominal ratings (See H) Unit Input voltage U 380V - 480V ±10 % 50/60 Hz (ACS143: 3~) Continuous output current I (4 kHz) Continuous output...
- Page 26 Heatsinkless 200 V series 0.12 0.18 0.25 0.37 0.55 0.75 Nominal motor P ACS141- 1~ Input H18-1 H25-1 H37-1 H75-1 1H1-1 1H6-1 Frame size Nominal ratings (See H) Unit Input voltage U 200 V-240 V ±10 % 50/60 Hz (ACS141: 1~) Continuous output current I (4 kHz)
- Page 27 Use 60 °C wire for an ambient temperature of 45 °C or less and use 75 °C wire for ambient temperature between 45 °C and 50 °C. Note! The output contactor can be used only as a safety device. Do not ac.maher.co.ir close the contactor when the ACS140 is running.
-
Page 28: Product Conformity
The ACS140 has UL, cUL and C-Tick markings for all power ranges, except C-Tick for ACS140 frame size H. The ACS140 is suitable for use on a circuit capable of delivering not more than 65,000 RMS symmetrical ampers (65 kA). -
Page 29: Accessories
U Accessories ACS100-PAN Control panel. PEC-98-0008 Panel Extension Cable kit for use with the ACS100/ACS140/ACS400. ACS140 RS485/232 Adapter ABC-PDP Fieldbus adapter for ProfiBus DP, requires the use of RS485/232 adapter. ABC-DEV Fieldbus adapter for DeviceNet, requires the use of RS485/232 adapter. -
Page 30: Programming
Programming Control Panel The control panel can be connected to and detached from the converter at any time. The panel can be used to copy parameters to other ACS140 with the same software revision (parameter 3301). Control modes Units mAVs... -
Page 31: Output Display
OUTPUT ENTER ENTER OUTPUT Menu Structure ACS140 has a large number of parameters. Of these, only the so-called basic parameters are initially visible. The menu function -LG- is used to make the full parameter set visible. OUTPUT display Parameter groups... -
Page 32: Menu Functions
Note! Selection of full menu remains after power down Diagnostic Displays When the red LED of the ACS140 is on or blinking, a fault is active. The relevant fault message flashes in the panel display. When the green LED of the ACS140 is blinking, an alarm is active. The relevant alarm message is shown in the panel display. -
Page 33: Resetting The Drive From The Control Panel
Resetting the Drive from the Control Panel When the red LED of the ACS140 is on or blinking, a fault is active. To reset a fault when the red LED is on, press the START/STOP button. Caution! This may start the drive, when in remote control. -
Page 34: Acs140 Basic Parameters
ACS140 Basic Parameters ACS140 has a large number of parameters. Of these, only the so called basic parameters are initially visible. Setting up only a few basic parameters is sufficient in applications where the preprogrammed application macros of the ACS140 can provide all desired functionality. - Page 35 Code Name User S Group 01 OPERATING DATA 0128 LAST FAULT Last recorded fault (0 = no fault). See “Diagnostics” starting on page Can be cleared with the control panel by pressing UP and DOWN buttons simultaneously when in parameter set mode. Group 10 COMMAND INPUTS 1003...
- Page 36 Default value: 50 Hz Note! Analogue output content is programmable. Values given here are valid only if other analogue output configuration parameters have not been modified. Description of all parameters is given in “ACS140 Complete Parameter List” starting on page 39. Group 20...
- Page 37 Code Name User S Group 21 START/STOP 2102 STOP FUNCTION Conditions during motor stopping. COAST Motor coasts to stop. RAMP Ramp deceleration as defined by the active deceleration time 2203 1 or 2205 DECELER TIME DECELER TIME Default value: 1 ( COAST Group 22 ACCELER/DECELER...
-
Page 38: Application Macros
Default values of certain parameters depend on the selected macro. These are listed with the description of each macro. Default values for other parameters are given in “ACS140 Complete Parameter List” starting on page Connection Examples In the following connection examples please note: •... -
Page 39: Application Macro Factory (0)
Relay output 2 Running: closed 19 RO 2B *Note! DI 4 is used to configure ACS140. It is read only once when power is connected. All parameters marked with * are determined by the DI4 input. Factory (0) parameter values:... -
Page 40: Application Macro Factory (1)
Relay output 2 Running: closed 19 RO 2B *Note! DI 4 is used to configure ACS140. It is read only once when power is connected. All parameters marked with * are determined by the DI4 input. Note! Stop input ( 2) deactivated: panel START/STOP button interlocked (local). -
Page 41: Application Macro Abb Standard
Application Macro ABB Standard This general purpose macro provides a general purpose 2-wire I/O configuration. It gives two more preset speeds compared to Factory Macro (0). The value of parameter 9902 is 1. Input signals Output signals DIP switch S1 •... -
Page 42: Application Macro 3-Wire
Application Macro 3-wire This macro is intended for those applications where the drive is controlled using momentary push-buttons. It gives two more preset speeds compared to Factory Macro (1) by using DI4 and DI5. The value of parameter 9902 is 2. Input signals Output signals DIP switch S1... -
Page 43: Application Macro Alternate
Application Macro Alternate This macro offers an I/O configuration that is adopted to a sequence of DI control signals used when alternating the direction of rotation of the drive. The value of parameter 9902 is 3. Input signals Output signals DIP switch S1 •... -
Page 44: Application Macro Motor Potentiometer
Output frequency 0...20 mA <=> 0...50 Hz AGND +12 V +12 VDC 10 DCOM 11 DI 1 Start/Stop: Activate to start ACS140 12 DI 2 Forward/Reverse: Activate to reverse rotation direction 13 DI 3 Reference up: Activate to increase reference*... -
Page 45: Application Macro Hand - Auto
Output frequency 0...20 mA <=> 0...50 Hz AGND +12 V +12 VDC 10 DCOM 11 DI 1 Start/Stop: Activate to start ACS140 (Hand) 12 DI 2 Forward/Reverse: Activate to reverse rota- tion direction (Hand) 13 DI 3 EXT1/EXT2 Select: Activate to select Auto... -
Page 46: Application Macro Pid Control
Output frequency 0...20 mA <=> 0...50 Hz 8 AGND 9 +12 V +12 VDC 10 DCOM 11 DI 1 Start/Stop: Activate to start ACS140* 12 DI 2 EXT1/EXT2 select: Activate to select PID control* 13 DI 3 Not Used 14 DI 4 Three constant speeds (1..3) are selected with two... -
Page 47: Application Macro Premagnetise
Output frequency 0...20 mA <=> 0...50 Hz AGND +12 V +12 VDC 10 DCOM 11 DI 1 Start/Stop: Activate to start ACS140 12 DI 2 Fwd/Rev: Activate to reverse rotation direction 13 DI 3 Constant speed select* 14 DI 4... -
Page 48: Acs140 Complete Parameter List
ACS140 Complete Parameter List Initially, only the so called basic parameters (shaded grey in Table 1) are visible. The menu function -LG- is used to make the full parameter set visible. S = Parameters can be modified only when the drive is stopped. - Page 49 Code Name Range Resolution Default User Group 10 COMMAND INPUTS 1001 0-10 COMMANDS 1002 0-10 COMMANDS NOT SEL 1003 DIRECTION REQUEST Group 11 REFERENCE SELECT 1101 KEYPAD REF SEL 1102 1103 0-11 1 (AI1) EXT REF SELECT 1104 0-300 Hz 1 Hz 0 Hz EXT REF...
- Page 50 Code Name Range Resolution Default User 1506 0-10 s 0.1 s 0.1 s FILTER AO Group 16 SYSTEM CONTROLS 1601 RUN ENABLE NOT SEL 1602 PARAMETER LOCK OPEN 1604 FAULT RESET SEL START STOP 1608 DISPLAY ALARMS Group 20 LIMITS 2003 0.5*I - 1.5*I...
- Page 51 Code Name Range Resolution Default User 2607 0-250 % SLIP COMP RATIO Group 30 FAULT FUNCTIONS 3001 < MIN FUNCTION FAULT 3002 PANEL LOSS FAULT 3003 EXTERNAL FAULT NOT SEL 3004 MOT THERM PROT FAULT 3005 256-9999 s 500 s MOT THERM TIME 3006 50-150 %...
- Page 52 INTERNAL SETPNT SEL SETPNT Group 52 SERIAL COMM For descriptions of parameters in this group, refer to ACS140 RS485 and RS232 Adapter Installation and Start-up Guide. Basic parameters are marked with a thick border as in the following: nnnn XXXX...
-
Page 53: Group 99: Start-Up Data
. The MOTOR NOM VOLT ACS140 cannot supply the motor with a voltage greater than the mains voltage. See Figure 1. 9906 MOTOR NOM CURR Nominal motor current from rating plate. The allowed range is 0.5 · I ... -
Page 54: Group 01: Operating Data
Displays the measured motor power in kW. Note! ACS100-PAN will not display the unit (“kW”). 0107 DC BUS VOLTAGE Displays the DC bus voltage, as measured by the ACS140. The voltage is displayed in Volts DC. 0109 OUTPUT VOLTAGE Displays the voltage applied to the motor. - Page 55 Code Description 0121 DI5 & RELAYS Status of digital input 5 and relay outputs. 1 indicates that the relay is energised and 0 indicates that the relay is de-energised. DI 5 Relay 2 status Relay 1 status 0122 AO Value of analogue output signal in milliamperes. 0124 ACTUAL VALUE 1 PID Controller actual value 1 ( 1), displayed in per cent (%).
-
Page 56: Group 10: Command Inputs
Group 10: Command Inputs Start, Stop and Direction commands can be given from the control panel or from two external locations ( 2). The selection between the two external locations is made with parameter 1102 . For more information on control locations refer to “APPENDIX” on page 93. Code Description 1001 EXT1 COMMANDS Defines the connections and the source of Start/Stop/Direction commands for... - Page 57 1002 EXT2 COMMANDS Defines the connections and the source of Start, Stop and Direction commands for external control location 2 ( Refer to parameter 1001 above. COMMANDS 1003 DIRECTION FORWARD REVERSE REQUEST Rotation direction lock. This parameter allows you to fix the direction of rotation of the motor to forward or reverse.
-
Page 58: Group 11: Reference Select
Group 11: Reference Select Reference commands can be given from the control panel or from two external locations. The selection between the two external locations is made with parameter 1102 . For more information on control locations, refer to “APPENDIX” on page 93. Code Description 1101 KEYPAD REF SEL... - Page 59 Caution: Minimum reference for joystick should be 0.3 V (0.6 mA) or higher. If a 0 ... 10 V signal is used, the ACS140 will operate at maximum reference in the reverse direction if the control signal is lost. Set parameter 3013...
- Page 60 1105 EXT REF1 MAX Sets the maximum frequency reference for external reference 1 in Hz. When analogue input signal is at maximum, external reference 1 equals to EXT REF . See Figure 3. 1106 EXT REF2 SELECT This parameter selects the signal source for external reference 2. The alternatives are the same as with external reference 1, see parameter 1103 SELECT 1107...
-
Page 61: Group 12: Constant Speeds
Group 12: Constant Speeds The ACS140 has 7 programmable constant speeds, ranging from 0 to 300 Hz. Negative speed values cannot be given for constant speeds. Constant speed selections are ignored if the process PID reference is followed (see PID Control Macro). -
Page 62: Group 13: Analogue Inputs
Group 13: Analogue Inputs Code Description 1301 MINIMUM AI1 Relative minimum value of AI1 (%). Value corresponds to minimum reference set by parameter 1104 or 1107 EXT REF EXT REF See Figure 3 on page 51 1302 MAXIMUM AI1 Maximum value of AI1 (%). Value corresponds to maximum reference set by parameter 1105 or 1108 EXT REF... -
Page 63: Group 14: Relay Outputs
Relay is not used and is de-energised. READY The ACS140 is ready to function. The relay is energised unless no run enable signal is present or a fault exists and supply voltage is within range. Relay energised when the ACS140 is running. -
Page 64: Group 15: Analogue Output
Group 15: Analogue Output Analogue output is used to output the value of any parameter of the Operating Data group (Group 1) as a current signal. Output current minimum and maximum values are configurable, as are the allowed minimum and maximum values for the observed parameter. -
Page 65: Group 16: System Controls
Selects the source of the run enable signal. NOT SEL The ACS140 is ready to start without an external run enable signal. 1...5 = DI1 ... DI5 To activate the run enable signal, the selected digital input must be activated. If the voltage drops and deactivates the selected digital input, the ACS140 will coast to stop and not start until the run enable signal resumes. -
Page 66: Group 20: Limits
To prevent the DC voltage from exceeding the limit, the overvoltage controller automatically decreases the braking torque. Caution! If a braking chopper and a braking resistor are connected to the ACS140, this parameter value must be set to 0 to ensure proper operation of the chopper. DISABLE... -
Page 67: Group 21: Start/Stop
Group 21: Start/Stop ACS140 supports several start and stop modes, including flying start and torque boosting at start. DC current can be injected either before the start command (premagnetising) or automatically right after the start command (starting with DC hold). - Page 68 Code Description 2107 START INHIBIT Start inhibit control. Start inhibit means that a pending start command is ignored when: • fault is reset, or • Run Enable activates while start command is active, or • mode change from local to remote takes place, or •...
-
Page 69: Group 22: Accel/Decel
Group 22: Accel/Decel Two acceleration/deceleration ramp pairs can be used. If both ramp pairs are used, selection can be made between these in run time through a digital input. The S curve of the ramps is adjustable. Code Description 2201 ACC/DEC 1/2 SEL Selects the source for the ramp pair selection signal. -
Page 70: Group 25: Critical Freq
In some mechanical systems, certain speed ranges can cause resonance problems. With this parameter group, it is possible to set up to two different speed ranges that the ACS140 will skip over. Note! When the PID Control macro is used, critical frequencies are ignored. -
Page 71: Group 26: Motor Control
Note! When the low noise (8 kHz) setting is used, the maximum loadability of at 30 °C ambient temperature or 0.9 * I at 40 °C. When the the ACS140 is I at 30 °C silent (16 kHz) setting is used, the maximum loadability is 0.75 * I ambient temperature. - Page 72 U (%) IR compensation IR compensation range No compensation Field weakening f (Hz) point Figure 8 Operation of IR compensation. ac.maher.co.ir...
-
Page 73: Group 30: Fault Functions
1208 CONST SPEED LAST SPEED A warning indication is displayed and the speed is set to the level the ACS140 was last operating at. This value is determined by the average speed over the last 10 seconds. Caution: If you select... - Page 74 Displays a warning indication at the warning level (97.5 % of the nominal value). Displays a fault indication when the motor temperature reaches the 100 % level. The ACS140 coasts to stop. WARNING A warning indication is displayed when the motor temperature reaches the warning level (95 % of the nominal value).
- Page 75 Figure 11. NOT SEL Stall protection is not used. FAULT When the protection is activated the ACS140 coasts to stop. Fault indication is displayed. WARNING A warning indication is displayed. The indication disappears in half the time set...
- Page 76 Trip time 60 s 90 s 180 s 300 s 600 s ∞ = output current = nominal current of the motor = output frequency = break point frequency (parameter 3008 BREAK POINT Figure 12 Thermal protection trip times when parameters 3005 MOT THERM , 3006 and 3007...
-
Page 77: Group 31: Automatic Reset
3101 NR OF TRIALS 3103 DELAY TIME This parameter sets the time that the ACS140 will wait after a fault occurs before attempting to reset. If set to zero, the ACS140 will reset immediately. 3104 AR OVERCURRENT DISABLE... -
Page 78: Group 32: Supervision
Group 32: Supervision Parameters of this group are used together with relay output parameters 1401 1 and 1402 2. Any two parameters of the RELAY OUTPUT RELAY OUTPUT Operating Data group (Group 1) can be supervised. Relays can be configured to be energised when the values of supervised parameters are either too low or too high. - Page 79 Value of supervised parameter HI (3203) LOW (3202) energised =1 de-energised = 0 energised =1 de-energised = 0 A = Parameter 1401 1 (1402 2) value is RELAY OUTPUT RELAY OUTPUT SUPRV OVER SUPRV OVER B = Parameter 1401 1 (1402 2) value is RELAY OUTPUT RELAY OUTPUT...
- Page 80 Value of supervised parameter LOW (3202) HI (3203) energised=1 de-energised=0 energised=1 de-energised=0 A = Parameter 1401 1 (1402 2) value is RELAY OUTPUT RELAY OUTPUT SUPRV OVER SUPRV OVER B = Parameter 1401 1 (1402 2) value is RELAY OUTPUT RELAY OUTPUT SUPRV UNDER...
-
Page 81: Group 33: Information
Group 33: Information Code Description 3301 SW VERSION Software version. 3302 TEST DATE Displays the test date of the ACS140 (yy.ww). ac.maher.co.ir... -
Page 82: Group 40: Pid Control
Group 40: PID Control The PID Control Macro allows the ACS140 to take a reference signal (setpoint) and an actual signal (feedback), and automatically adjust the speed of the drive to match the actual signal to the reference. Figure 26 on page 96 (APPENDIX) shows the connections of internal signals when the PID Control macro is selected. - Page 83 Code Description 4005 ERROR VALUE INV Process error value inversion. Normally, a decrease in feedback signal causes an increase in drive speed. If a decrease in feedback signal is desired to cause a decrease in speed, set to 1 ( ERROR VALUE INV 4006 ACTUAL VAL SEL PID controller feedback (actual) signal selection.
- Page 84 Code Description 4009 ACT1 MINIMUM Minimum value for actual value 1 ( 1). The setting range is -1000 to +1000 %. Refer to Figure 16 and to Group 13 parameters for analogue input minimum and maximum settings. 4010 ACT1 MAXIMUM Maximum value for actual value 1 ( 1).
- Page 85 Code Description 4013 PID SLEEP DELAY Time delay for the sleep function, see Figure 17. If the ACS140 output frequency is below a set level (parameter 4014 ) longer than SLEEP LEVEL , ACS140 is stopped. SLEEP DELAY 4014 PID SLEEP LEVEL Level for activation of sleep function, see Figure 17.
- Page 86 NON INVERTED ERROR VALUE 4015 WAKE UP LEVEL 1108 EXT REF 100 % SETPOINT 75 % APPLIED WAKE UP LEVEL 1107 EXT REF Figure 18 Example of how the applied wake-up level floats with the set point, here parameter 4015 equals to 75 %, PID control non-inverted WAKE UP LEVEL...
- Page 87 EXTERNAL Process reference is read from a source defined with parameter 1106 EXT REF . The ACS140 must be in remote mode (REM is shown on control panel SELECT display).* * Process reference to PID controller can also be given from the control panel in local mode (LOC is shown on control panel display) if the panel reference is given as percentage, i.e.
-
Page 88: Group 52: Serial Communication
The serial communication link of the ACS140 uses Modicon Modbus protocol. For description of the ACS140 serial communication capabilities, as well as for the descriptions of the parameters of this group, refer to ACS140 RS485 and RS232 Adapter Installation and Start-up Guide. - Page 89 ac.maher.co.ir...
-
Page 90: Diagnostics
When the fault has been removed, the motor can be started. The ACS140 can be configured to automatically reset certain faults. Refer to parameter group 31 AUTOMATIC RESET. Warning! If an external source for start command is selected and is still active, the ACS140 may start immediately after fault reset. - Page 91 Undervoltage controller active. AL13 Direction lock. See parameter 1003 DIRECTION AL14 Serial communication loss alarm, see ACS140 RS485 and RS232 Adapter Installation and Start-up Guide. AL15* Modbus exception response is sent through serial communication. AL16 Analogue input 1 loss. Analogue input 1 value is less than MINIMUM (1301).
- Page 92 See parameter 3002 and APPENDIX. PANEL LOSS Note! If FL10 is active when the power is turned off, the ACS140 will start in remote control (REM) when the power is turned back on. FL11 Parameters inconsistent. Possible fault situations: •...
- Page 93 ac.maher.co.ir...
-
Page 94: Acs140 Emc Instructions
CE Marking A CE mark is attached to ACS140 frequency converters to verify that the unit follows the provisions of the European Low Voltage and EMC Directives (Directive 73/23/EEC, as amended by 93/68/EEC and Directive 89/336/ EEC, as amended by 93/68/EEC). - Page 95 Cabling Instructions Keep individual unscreened wires between the cable clamps and the screw terminals as short as possible. Route control cables away from power cables. Mains Cable A three conductor cable (single phase and neutral with protective earth) or four conductor cable (three phase with protective earth) are recommended for the mains cabling.
- Page 96 Never mix 24 VDC and 115/230 VAC signals in the same cable. Note! When the overriding control equipment and the ACS140 are installed inside the same cabinet, these recommendations might be overly cautious. If...
- Page 97 360 degrees with an EMC cable gland (e.g. Zemrex SCG screened cable glands). Table 8 Maximum motor cable lengths with input filter ACS100/140-IFAB-1, -IFCD-1, or ACS140-IFAB-3, -IFCD-3 and switching frequency 4 kHz, 8 kHz or 16 kHz. ACS100/140-IFAB-1...
- Page 98 **ACS143-4K1-1: maximum continuous load 70 % of nominal. For ACS141-4K1-1 and ACS143-4K1-1, a cable shown in Figure 21 is required. If input filter ACS100-FLT-C or ACS140-FLT-C is used with 200 V units, always use output choke ACS-CHK-B when motor cable length exceeds 50 m.
- Page 99 Table 10 Maximum motor cable lengths with input filter ACS100-FLT-D, -E or ACS140-FLT-D and switching frequency 4 kHz. ACS100-FLT-D ACS100-FLT-E Converter type 4 kHz 4 kHz ACS141-K75-1 ACS141-1K1-1 ACS141-1K6-1 ACS141-2K1-1 ACS141-2K7-1 ACS141-4K1-1 ACS140-FLT-D Converter type 4 kHz ACS143-xKx-3 For 1-phase converters ACS141-xKx-1 two chokes ACS-CHK-A or ACS- CHK-C are supplied in the filter package.
- Page 100 360 degrees with an EMC cable gland (e.g. Zemrex SCG screened cable glands). Table 11 Maximum motor cable lengths with input filter ACS100/140-IFAB-1, -IFCD-1, or ACS140-IFAB-3, -IFCD-3 and switching frequency 4 kHz, 8 kHz or 16 kHz. ACS100/140-IFAB-1...
- Page 101 Public Low Voltage Network The limits and requirements of the EN 1000-3-2 apply for equipment with rated current ≤16 A. The ACS140 is a professional equipment to be used in trades, professions, or industries and is not intended for sale to the general public.
-
Page 102: Appendix
External Reference 2 (%) Figure 23 Control locations. Local Control The control commands are given explicitly from the control panel when the ACS140 is in local control. This is indicated by LOC on the control panel display. OUTPUT Parameter 1101... -
Page 103: Remote Control
Remote Control When the ACS140 is in remote control (REM), the commands are given primarily through digital and analogue inputs, although commands can be given also through the control panel or serial communication. Parameter 1102 selects between the two external control... -
Page 104: Internal Signal Connections For The Macros
Local NOT SEL REQUEST DI1-DI5 Direction Remote FORWARD NOT SEL KEYPAD DI1-DI5 REVERSE Enabled, KEYPAD DI1-DI5 RUN ENABLE DIRECTION 1601 COMMANDS 1003 COMMANDS 1001 1002 Figure 25 The control signal connections of the ABB Standard, Alternate and Premagnetise macros. ac.maher.co.ir... - Page 105 EXT REF CONST EXT REF KEYPAD SELECT SPEED SEL SELECT REF SEL 1103 1102 1201 1106 1101 Control Terminals Analogue KEYPAD inputs Remote AI1, AI2 Min freq Remote Max freq Digital KEYPAD Local Applic Local inputs Crit. sp. Const. DI1-DI5 speeds Acc/Dec ACTUAL...
- Page 106 ac.maher.co.ir...
- Page 107 ABB Oy AC Drives P.O. Box 184 00381 Helsinki FINLAND Telephone +358-10-22 11 Telefax +358-10-22 22681 ac.maher.co.ir...